Zusammenfassung
In diesem Beitrag soll erklärt werden, wie mit einem Arduino Uno Daten erfasst werden und mittels JSON an einen WebServer übermittelt werden können. Mit Hilfe von NodeJS wird ein WebSever aufgebaut, der die vom Arduino übermittelten Daten verarbeitet und in einem Diagramm dargestellt. Ich verwende dazu das GitHub Projekt arduino-livechart, bei dem (da in der neuen Version von express.js keine Middleware mehr enthalten ist) einige Anpassungen nötig sind, damit die aktuelle Version von NodeJS verwendet werden kann.
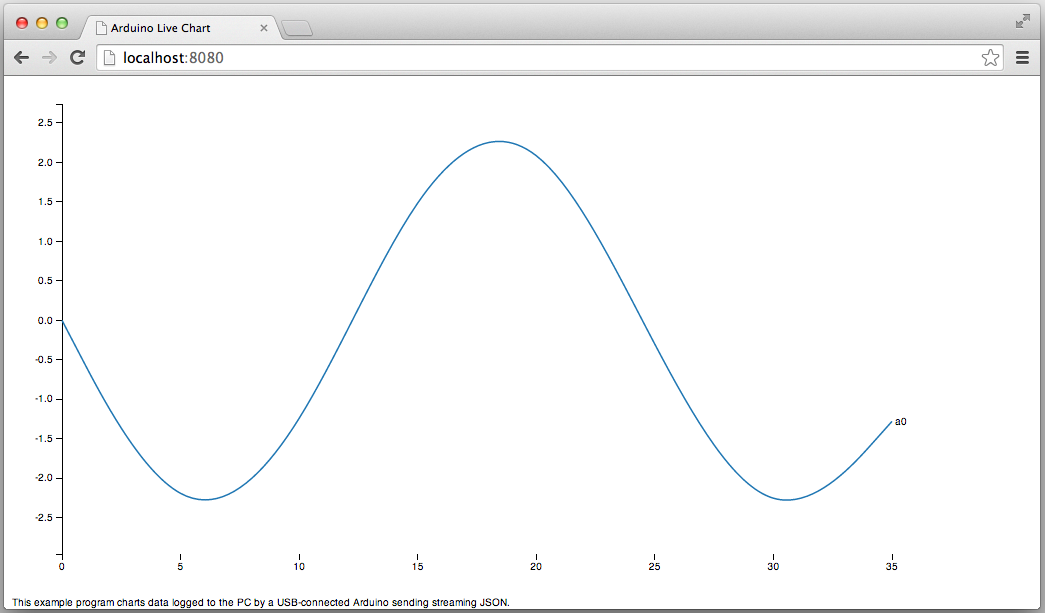

Arduino — Datenvisualisierung mit NodeJS weiterlesen
 weiter drehen. Wird die Winkelgeschwindigkeit
weiter drehen. Wird die Winkelgeschwindigkeit  nur durch die Wartezeit
nur durch die Wartezeit  zwischen zwei Pulsen beeinflusst. Wenn
zwischen zwei Pulsen beeinflusst. Wenn ![<br /> \begin{tikzpicture}[scale=2]</p> <p>% Include tikz into local preamble<br /> [+preamble]<br /> \usepackage{tikz}<br /> [/preamble]<br /> %\draw[style=help lines] (0,0) grid (7,4);<br /> % dt(t) function<br /> \draw[blue, line width=2] (0,3) -- (2,1);<br /> \draw[blue, line width=2] (2,1) -- (5,1);<br /> \draw[blue, line width=2] (5,1) -- (7,3); </p> <p> \draw[grey, dotted, line width=1] (2,3.1) -- (2,-0.1) node[below] {$t_1$};<br /> \draw[grey, dotted, line width=1] (5,3.1) -- (5,-0.1) node[below] {$t_2$};<br /> \draw[grey, dotted, line width=1] (7,3.1) -- (7,-0.1) node[below] {$t_{end}$}; </p> <p> \draw[grey, dotted, line width=1] (7,3) -- (-0.1,3) node[left] {$\Delta t_{max}$};<br /> \draw[grey, dotted, line width=1] (7,1) -- (-0.1,1) node[left] {$\Delta t_{min}$}; </p> <p> \draw[->] (-0.2,0) -- (7.2,0) node[right] {\Large $t$};<br /> \draw[->] (0,-0.2) -- (0,3.4) node[above] {\Large $\Delta t(t)$};</p> <p> \node [above] at (1,2.6) {\Lage I};<br /> \node [above] at (3.5,2.6) {\Lage II};<br /> \node [above] at (6,2.6) {\Lage III};</p> <p>\end{tikzpicture}<br />](http://s0.wp.com/latex.php?latex=%3Cbr+%2F%3E+%5Cbegin%7Btikzpicture%7D%5Bscale%3D2%5D%3C%2Fp%3E+%3Cp%3E%25+Include+tikz+into+local+preamble%3Cbr+%2F%3E+%5B%2Bpreamble%5D%3Cbr+%2F%3E++++++%5Cusepackage%7Btikz%7D%3Cbr+%2F%3E+%5B%2Fpreamble%5D%3Cbr+%2F%3E+++%25%5Cdraw%5Bstyle%3Dhelp+lines%5D+%280%2C0%29+grid+%287%2C4%29%3B%3Cbr+%2F%3E+++%25+dt%28t%29+function%3Cbr+%2F%3E+++%5Cdraw%5Bblue%2C+line+width%3D2%5D+%280%2C3%29+--+%282%2C1%29%3B%3Cbr+%2F%3E+++%5Cdraw%5Bblue%2C+line+width%3D2%5D+%282%2C1%29+--+%285%2C1%29%3B%3Cbr+%2F%3E+++%5Cdraw%5Bblue%2C+line+width%3D2%5D+%285%2C1%29+--+%287%2C3%29%3B++%3C%2Fp%3E+%3Cp%3E++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%282%2C3.1%29+--+%282%2C-0.1%29+node%5Bbelow%5D+%7B%24t_1%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%285%2C3.1%29+--+%285%2C-0.1%29+node%5Bbelow%5D+%7B%24t_2%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%287%2C3.1%29+--+%287%2C-0.1%29+node%5Bbelow%5D+%7B%24t_%7Bend%7D%24%7D%3B+%3C%2Fp%3E+%3Cp%3E++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%287%2C3%29+--+%28-0.1%2C3%29+node%5Bleft%5D+%7B%24%5CDelta+t_%7Bmax%7D%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%287%2C1%29+--+%28-0.1%2C1%29+node%5Bleft%5D+%7B%24%5CDelta+t_%7Bmin%7D%24%7D%3B+%3C%2Fp%3E+%3Cp%3E++%5Cdraw%5B-%3E%5D++%28-0.2%2C0%29+--+%287.2%2C0%29+node%5Bright%5D+%7B%5CLarge+%24t%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5B-%3E%5D++%280%2C-0.2%29+--+%280%2C3.4%29+node%5Babove%5D+%7B%5CLarge+%24%5CDelta+t%28t%29%24%7D%3B%3C%2Fp%3E+%3Cp%3E++%5Cnode+%5Babove%5D+at+%281%2C2.6%29+%7B%5CLage+I%7D%3B%3Cbr+%2F%3E+++%5Cnode+%5Babove%5D+at+%283.5%2C2.6%29+%7B%5CLage+II%7D%3B%3Cbr+%2F%3E+++%5Cnode+%5Babove%5D+at+%286%2C2.6%29+%7B%5CLage+III%7D%3B%3C%2Fp%3E+%3Cp%3E%5Cend%7Btikzpicture%7D%3Cbr+%2F%3E+&bg=ffffff&fg=000&s=0 "<br /> \begin{tikzpicture}[scale=2]</p> <p>% Include tikz into local preamble<br /> [+preamble]<br /> \usepackage{tikz}<br /> [/preamble]<br /> %\draw[style=help lines] (0,0) grid (7,4);<br /> % dt(t) function<br /> \draw[blue, line width=2] (0,3) -- (2,1);<br /> \draw[blue, line width=2] (2,1) -- (5,1);<br /> \draw[blue, line width=2] (5,1) -- (7,3); </p> <p> \draw[grey, dotted, line width=1] (2,3.1) -- (2,-0.1) node[below] {$t_1$};<br /> \draw[grey, dotted, line width=1] (5,3.1) -- (5,-0.1) node[below] {$t_2$};<br /> \draw[grey, dotted, line width=1] (7,3.1) -- (7,-0.1) node[below] {$t_{end}$}; </p> <p> \draw[grey, dotted, line width=1] (7,3) -- (-0.1,3) node[left] {$\Delta t_{max}$};<br /> \draw[grey, dotted, line width=1] (7,1) -- (-0.1,1) node[left] {$\Delta t_{min}$}; </p> <p> \draw[->] (-0.2,0) -- (7.2,0) node[right] {\Large $t$};<br /> \draw[->] (0,-0.2) -- (0,3.4) node[above] {\Large $\Delta t(t)$};</p> <p> \node [above] at (1,2.6) {\Lage I};<br /> \node [above] at (3.5,2.6) {\Lage II};<br /> \node [above] at (6,2.6) {\Lage III};</p> <p>\end{tikzpicture}<br />")
![<br /> \begin{tikzpicture}[scale=2]</p> <p>% Include tikz into local preamble<br /> [+preamble]<br /> \usepackage{tikz}<br /> [/preamble]<br /> %\draw[style=help lines] (0,0) grid (7,4);<br /> % phi(t) function<br /> \draw[red, line width=2] (0,1) -- (2,3);<br /> \draw[red, line width=2] (2,3) -- (5,3);<br /> \draw[red, line width=2] (5,3) -- (7,1); </p> <p> \draw[grey, dotted, line width=1] (2,3.1) -- (2,-0.1) node[below] {$t_1$};<br /> \draw[grey, dotted, line width=1] (5,3.1) -- (5,-0.1) node[below] {$t_2$};<br /> \draw[grey, dotted, line width=1] (7,3.1) -- (7,-0.1) node[below] {$t_{end}$}; </p> <p> \draw[grey, dotted, line width=1] (7,3) -- (-0.1,3) node[left] {$\phi_{max}$};<br /> \draw[grey, dotted, line width=1] (7,1) -- (-0.1,1) node[left] {$\phi_{min}$}; </p> <p> \draw[->] (-0.2,0) -- (7.2,0) node[right] {\Large $t$};<br /> \draw[->] (0,-0.2) -- (0,3.4) node[above] {\Large $\phi(t)$};</p> <p> \node [above] at (1,2.6) {\Lage I};<br /> \node [above] at (3.5,2.6) {\Lage II};<br /> \node [above] at (6,2.6) {\Lage III};</p> <p>\end{tikzpicture}<br />](http://s0.wp.com/latex.php?latex=%3Cbr+%2F%3E+%5Cbegin%7Btikzpicture%7D%5Bscale%3D2%5D%3C%2Fp%3E+%3Cp%3E%25+Include+tikz+into+local+preamble%3Cbr+%2F%3E+%5B%2Bpreamble%5D%3Cbr+%2F%3E++++++%5Cusepackage%7Btikz%7D%3Cbr+%2F%3E+%5B%2Fpreamble%5D%3Cbr+%2F%3E+++%25%5Cdraw%5Bstyle%3Dhelp+lines%5D+%280%2C0%29+grid+%287%2C4%29%3B%3Cbr+%2F%3E+++%25+phi%28t%29+function%3Cbr+%2F%3E+++%5Cdraw%5Bred%2C+line+width%3D2%5D+%280%2C1%29+--+%282%2C3%29%3B%3Cbr+%2F%3E+++%5Cdraw%5Bred%2C+line+width%3D2%5D+%282%2C3%29+--+%285%2C3%29%3B%3Cbr+%2F%3E+++%5Cdraw%5Bred%2C+line+width%3D2%5D+%285%2C3%29+--+%287%2C1%29%3B++%3C%2Fp%3E+%3Cp%3E++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%282%2C3.1%29+--+%282%2C-0.1%29+node%5Bbelow%5D+%7B%24t_1%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%285%2C3.1%29+--+%285%2C-0.1%29+node%5Bbelow%5D+%7B%24t_2%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%287%2C3.1%29+--+%287%2C-0.1%29+node%5Bbelow%5D+%7B%24t_%7Bend%7D%24%7D%3B+%3C%2Fp%3E+%3Cp%3E++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%287%2C3%29+--+%28-0.1%2C3%29+node%5Bleft%5D+%7B%24%5Cphi_%7Bmax%7D%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%287%2C1%29+--+%28-0.1%2C1%29+node%5Bleft%5D+%7B%24%5Cphi_%7Bmin%7D%24%7D%3B+%3C%2Fp%3E+%3Cp%3E++%5Cdraw%5B-%3E%5D++%28-0.2%2C0%29+--+%287.2%2C0%29+node%5Bright%5D+%7B%5CLarge+%24t%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5B-%3E%5D++%280%2C-0.2%29+--+%280%2C3.4%29+node%5Babove%5D+%7B%5CLarge+%24%5Cphi%28t%29%24%7D%3B%3C%2Fp%3E+%3Cp%3E++%5Cnode+%5Babove%5D+at+%281%2C2.6%29+%7B%5CLage+I%7D%3B%3Cbr+%2F%3E+++%5Cnode+%5Babove%5D+at+%283.5%2C2.6%29+%7B%5CLage+II%7D%3B%3Cbr+%2F%3E+++%5Cnode+%5Babove%5D+at+%286%2C2.6%29+%7B%5CLage+III%7D%3B%3C%2Fp%3E+%3Cp%3E%5Cend%7Btikzpicture%7D%3Cbr+%2F%3E+&bg=ffffff&fg=000&s=0 "<br /> \begin{tikzpicture}[scale=2]</p> <p>% Include tikz into local preamble<br /> [+preamble]<br /> \usepackage{tikz}<br /> [/preamble]<br /> %\draw[style=help lines] (0,0) grid (7,4);<br /> % phi(t) function<br /> \draw[red, line width=2] (0,1) -- (2,3);<br /> \draw[red, line width=2] (2,3) -- (5,3);<br /> \draw[red, line width=2] (5,3) -- (7,1); </p> <p> \draw[grey, dotted, line width=1] (2,3.1) -- (2,-0.1) node[below] {$t_1$};<br /> \draw[grey, dotted, line width=1] (5,3.1) -- (5,-0.1) node[below] {$t_2$};<br /> \draw[grey, dotted, line width=1] (7,3.1) -- (7,-0.1) node[below] {$t_{end}$}; </p> <p> \draw[grey, dotted, line width=1] (7,3) -- (-0.1,3) node[left] {$\phi_{max}$};<br /> \draw[grey, dotted, line width=1] (7,1) -- (-0.1,1) node[left] {$\phi_{min}$}; </p> <p> \draw[->] (-0.2,0) -- (7.2,0) node[right] {\Large $t$};<br /> \draw[->] (0,-0.2) -- (0,3.4) node[above] {\Large $\phi(t)$};</p> <p> \node [above] at (1,2.6) {\Lage I};<br /> \node [above] at (3.5,2.6) {\Lage II};<br /> \node [above] at (6,2.6) {\Lage III};</p> <p>\end{tikzpicture}<br />")
![$ \left[0,t_{end}\right] $](http://s0.wp.com/latex.php?latex=+%24+%5Cleft%5B0%2Ct_%7Bend%7D%5Cright%5D+%24+&bg=ffffff&fg=000&s=0 "$ \left[0,t_{end}\right] $") aus? Dann weiß man um auch welche Gesamtwinkel sich die Schrittmotoren gedreht haben und damit die Länge des zurückgelegten Weges.
aus? Dann weiß man um auch welche Gesamtwinkel sich die Schrittmotoren gedreht haben und damit die Länge des zurückgelegten Weges. 
 = a t$") . Damit erhält man die interativen Formel für den neuen Zeitpunkt
. Damit erhält man die interativen Formel für den neuen Zeitpunkt  zu:
zu: oder
oder t_k \end{eqnarray}") .
.$") kann als Propergator der Dynamik verstanden werden.
kann als Propergator der Dynamik verstanden werden.![<br /> \begin{tikzpicture}[scale=1]</p> <p>% Include tikz into local preamble<br /> [+preamble]<br /> \usepackage{tikz}<br /> [/preamble]<br /> %\draw[style=help lines] (0,0) grid (4,4);<br /> % dt(t) function<br /> \draw[blue, line width=2] (0,0) -- (3.7,4); </p> <p> \draw[grey, line width=1] (0.7,0.1) -- (0.7,-0.1) node[below] {$t_k$};<br /> \draw[grey, line width=1] (1.3,0.1) -- (1.3,-0.1) node[below] {$t_{k+2}$};<br /> \draw[grey, dotted, line width=1] (3.2,4.2) -- (3.2,-0.1) node[below] {$t_N$}; </p> <p> \draw[->] (-0.2,0) -- (4.2,0) node[right] {\Large $t$};<br /> \draw[->] (0,-0.2) -- (0,4.4) node[above] {\Large $dt(t)$};</p> <p>\end{tikzpicture}<br />](http://s0.wp.com/latex.php?latex=%3Cbr+%2F%3E+%5Cbegin%7Btikzpicture%7D%5Bscale%3D1%5D%3C%2Fp%3E+%3Cp%3E%25+Include+tikz+into+local+preamble%3Cbr+%2F%3E+%5B%2Bpreamble%5D%3Cbr+%2F%3E++++++%5Cusepackage%7Btikz%7D%3Cbr+%2F%3E+%5B%2Fpreamble%5D%3Cbr+%2F%3E+++%25%5Cdraw%5Bstyle%3Dhelp+lines%5D+%280%2C0%29+grid+%284%2C4%29%3B%3Cbr+%2F%3E+++%25+dt%28t%29+function%3Cbr+%2F%3E+++%5Cdraw%5Bblue%2C+line+width%3D2%5D+%280%2C0%29+--+%283.7%2C4%29%3B++++%3C%2Fp%3E+%3Cp%3E++%5Cdraw%5Bgrey%2C+line+width%3D1%5D+%280.7%2C0.1%29+--+%280.7%2C-0.1%29+node%5Bbelow%5D+%7B%24t_k%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5Bgrey%2C+line+width%3D1%5D+%281.3%2C0.1%29+--+%281.3%2C-0.1%29+node%5Bbelow%5D+%7B%24t_%7Bk%2B2%7D%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5Bgrey%2C+dotted%2C+line+width%3D1%5D+%283.2%2C4.2%29+--+%283.2%2C-0.1%29+node%5Bbelow%5D+%7B%24t_N%24%7D%3B+%3C%2Fp%3E+%3Cp%3E++%5Cdraw%5B-%3E%5D++%28-0.2%2C0%29+--+%284.2%2C0%29+node%5Bright%5D+%7B%5CLarge+%24t%24%7D%3B%3Cbr+%2F%3E+++%5Cdraw%5B-%3E%5D++%280%2C-0.2%29+--+%280%2C4.4%29+node%5Babove%5D+%7B%5CLarge+%24dt%28t%29%24%7D%3B%3C%2Fp%3E+%3Cp%3E%5Cend%7Btikzpicture%7D%3Cbr+%2F%3E+&bg=ffffff&fg=000&s=0 "<br /> \begin{tikzpicture}[scale=1]</p> <p>% Include tikz into local preamble<br /> [+preamble]<br /> \usepackage{tikz}<br /> [/preamble]<br /> %\draw[style=help lines] (0,0) grid (4,4);<br /> % dt(t) function<br /> \draw[blue, line width=2] (0,0) -- (3.7,4); </p> <p> \draw[grey, line width=1] (0.7,0.1) -- (0.7,-0.1) node[below] {$t_k$};<br /> \draw[grey, line width=1] (1.3,0.1) -- (1.3,-0.1) node[below] {$t_{k+2}$};<br /> \draw[grey, dotted, line width=1] (3.2,4.2) -- (3.2,-0.1) node[below] {$t_N$}; </p> <p> \draw[->] (-0.2,0) -- (4.2,0) node[right] {\Large $t$};<br /> \draw[->] (0,-0.2) -- (0,4.4) node[above] {\Large $dt(t)$};</p> <p>\end{tikzpicture}<br />")
t_{0} \\<br /> t_{2} &=& (1+a)t_{1} = (1+a)(1+a)t_0 = (1+a)^2 t_0<br /> \end{eqnarray*}<br />")
t_{k-1} = \dots = (1+a)^k t_0<br /> \end{eqnarray}<br />")
 ist ok
ist ok^k t_0 $") sei richtig
sei richtig
t_{k} = (1+a) (1+a)^k t_0 = (1+a)^{k+1}t_0<br /> \end{eqnarray*}<br />")
 Schritten:
Schritten: für
für 
^k t_0<br /> \end{eqnarray}<br />")
![<br /> \begin{eqnarray}<br /> \sum_{k=1}^N q^k = \frac{q[q^N - 1]}{q-1} \qquad \intertext{f\"ur} \quad q > 0<br /> \end{eqnarray}<br />](http://s0.wp.com/latex.php?latex=%3Cbr+%2F%3E+%5Cbegin%7Beqnarray%7D%3Cbr+%2F%3E+++++%5Csum_%7Bk%3D1%7D%5EN+q%5Ek+%3D+%5Cfrac%7Bq%5Bq%5EN+-+1%5D%7D%7Bq-1%7D+%5Cqquad+%5Cintertext%7Bf%5C%22ur%7D+%5Cquad+q+%3E+0%3Cbr+%2F%3E+%5Cend%7Beqnarray%7D%3Cbr+%2F%3E+&bg=ffffff&fg=000&s=0 "<br /> \begin{eqnarray}<br /> \sum_{k=1}^N q^k = \frac{q[q^N - 1]}{q-1} \qquad \intertext{f\\"ur} \quad q > 0<br /> \end{eqnarray}<br />")
![<br /> \begin{eqnarray}<br /> t_N = (a+1) [(a+1)^N -1] t_0<br /> \end{eqnarray}<br />](http://s0.wp.com/latex.php?latex=%3Cbr+%2F%3E+%5Cbegin%7Beqnarray%7D%3Cbr+%2F%3E++++t_N+%3D+%28a%2B1%29+%5B%28a%2B1%29%5EN+-1%5D+t_0%3Cbr+%2F%3E+%5Cend%7Beqnarray%7D%3Cbr+%2F%3E+&bg=ffffff&fg=000&s=0 "<br /> \begin{eqnarray}<br /> t_N = (a+1) [(a+1)^N -1] t_0<br /> \end{eqnarray}<br />")
![<br /> \begin{eqnarray*}<br /> t_N $=$ (a+1) [(a+1)^N -1] t_0 \end{eqnarray*}<br />](http://s0.wp.com/latex.php?latex=%3Cbr+%2F%3E+%5Cbegin%7Beqnarray%2A%7D%3Cbr+%2F%3E++++t_N+%24%3D%24+%28a%2B1%29+%5B%28a%2B1%29%5EN+-1%5D+t_0+%5Cend%7Beqnarray%2A%7D%3Cbr+%2F%3E+&bg=ffffff&fg=000&s=0 "<br /> \begin{eqnarray*}<br /> t_N $=$ (a+1) [(a+1)^N -1] t_0 \end{eqnarray*}<br />")
^N$") ergibt:
ergibt:^N = \frac{t_N}{(a+1)t_0} +1<br /> \end{eqnarray*}<br />")
 = N log(q)$") erhält man:
erhält man:^N &=& \frac{t_N}{(a+1)t_0} +1 \\<br /> N log(a+1) &=& log(\frac{t_N}{(a+1)t_0} +1).<br /> \end{eqnarray*}<br />")
t_0} +1)}{log(a+1)}<br /> \end{eqnarray}<br />")

t_0} +1)}{log(a_{I}+1)} + \frac{t_{II}}{dt{min}} + \frac{log(\frac{t_{III}}{(a_{III}+1)t_0} +1)}{log(a_{III}+1)}<br /> \end{eqnarray}<br />")
 .
.

